標(biāo)題: Titlebook: Robotic Grasping and Manipulation; First Robotic Graspi Yu Sun,Joe Falco Conference proceedings 2018 Springer International Publishing AG, [打印本頁(yè)] 作者: foresight 時(shí)間: 2025-3-21 19:06
書目名稱Robotic Grasping and Manipulation影響因子(影響力)
書目名稱Robotic Grasping and Manipulation影響因子(影響力)學(xué)科排名
書目名稱Robotic Grasping and Manipulation網(wǎng)絡(luò)公開(kāi)度
書目名稱Robotic Grasping and Manipulation網(wǎng)絡(luò)公開(kāi)度學(xué)科排名
書目名稱Robotic Grasping and Manipulation被引頻次
書目名稱Robotic Grasping and Manipulation被引頻次學(xué)科排名
書目名稱Robotic Grasping and Manipulation年度引用
書目名稱Robotic Grasping and Manipulation年度引用學(xué)科排名
書目名稱Robotic Grasping and Manipulation讀者反饋
書目名稱Robotic Grasping and Manipulation讀者反饋學(xué)科排名
作者: 運(yùn)動(dòng)吧 時(shí)間: 2025-3-21 21:59
Yu Sun,Joe Falco,Nadia Cheng,Hyouk Ryeol Choi,Erik D. Engeberg,Nancy Pollard,Maximo Roa,Zeyang Xiaplan, Editor of the Kluwer/Plenum Handbooks of Sociology and Social Research, asked Dudley Poston to edit a Handbook of Population. Poston then asked his long-time collaborator and fellow demographer, Michael Micklin, to join him as co-editor. Poston and Micklin next assembled a list of chapter topi作者: insolence 時(shí)間: 2025-3-22 03:26 作者: 原來(lái) 時(shí)間: 2025-3-22 05:54
Yang Chen,Shaofei Guo,Hui Yang,Lina Haoopulation studies.Dudley Poston is the Abell Professor of LiCompletion of this Handbook would not have been possible without the generous and dedicated assistance of numerous people. Several years ago Howard Kaplan, Editor of the Kluwer/Plenum Handbooks of Sociology and Social Research, asked Dudley作者: 果仁 時(shí)間: 2025-3-22 12:47
Dipayan Das,Nathanael J. Rake,Joshua A. Schultzplan, Editor of the Kluwer/Plenum Handbooks of Sociology and Social Research, asked Dudley Poston to edit a Handbook of Population. Poston then asked his long-time collaborator and fellow demographer, Michael Micklin, to join him as co-editor. Poston and Micklin next assembled a list of chapter topi作者: 鍵琴 時(shí)間: 2025-3-22 16:55 作者: neologism 時(shí)間: 2025-3-22 17:15
Radhen Patel,Jacob Segil,Nikolaus CorrellD hierarchical porous carbon.Provides new schemes and method.This handbook summarizes the current advancements and growth in sustainable carbonaceous porous materials for fabrication and revival of energy devices, fuel cells, sensors technology, solar cell technology, stealth technology in addition 作者: acquisition 時(shí)間: 2025-3-22 21:40 作者: Flounder 時(shí)間: 2025-3-23 04:27 作者: 潰爛 時(shí)間: 2025-3-23 07:49
Radhen Patel,Rebeca Curtis,Branden Romero,Nikolaus Correllon materials with random morphologies and hence consequent in poor material utilization. To enhance the efficiency of these materials for different applications, advanced synthesis methods are required that are capable of producing application specific properties. Nanostructuring is one of the advan作者: 遷移 時(shí)間: 2025-3-23 13:08 作者: 傷心 時(shí)間: 2025-3-23 15:14 作者: Arable 時(shí)間: 2025-3-23 18:39 作者: stress-test 時(shí)間: 2025-3-23 22:58
nd students who are engaged in port planning and design, handling process design, port machinery product design, portmachinery use and maintenance. A comprehensive guide to port handling machinery, it reflects the current state of development and application status of port machinery in China..978-981-99-4848-2作者: Expostulate 時(shí)間: 2025-3-24 04:12
demy. In the subsequent development of this Handbook, we worked closely with Teresa Kraus, our editor at Springer, and also received advice from Howard Kaplan. Poston and Micklin read and edited each of the Han978-0-387-25702-0978-0-387-23106-8Series ISSN 1389-6903 Series E-ISSN 2542-839X 作者: prostatitis 時(shí)間: 2025-3-24 10:07
Manuel Bonilla,Cosimo Della Santina,Alessio Rocchi,Emanuele Luberto,Gaspare Santaera,Edoardo Farnioldemy. In the subsequent development of this Handbook, we worked closely with Teresa Kraus, our editor at Springer, and also received advice from Howard Kaplan. Poston and Micklin read and edited each of the Han978-0-387-25702-0978-0-387-23106-8Series ISSN 1389-6903 Series E-ISSN 2542-839X 作者: MIME 時(shí)間: 2025-3-24 12:17
Yang Chen,Shaofei Guo,Hui Yang,Lina Haodemy. In the subsequent development of this Handbook, we worked closely with Teresa Kraus, our editor at Springer, and also received advice from Howard Kaplan. Poston and Micklin read and edited each of the Han978-0-387-25702-0978-0-387-23106-8Series ISSN 1389-6903 Series E-ISSN 2542-839X 作者: Antimicrobial 時(shí)間: 2025-3-24 17:57 作者: 背書 時(shí)間: 2025-3-24 21:05 作者: 藕床生厭倦 時(shí)間: 2025-3-25 00:10 作者: 不能和解 時(shí)間: 2025-3-25 04:08
Radhen Patel,Jacob Segil,Nikolaus Correllive solutions for improvement in the performance of carbon-based materials. Given the content, this handbook will be useful for students, researchers and professionals working in the area of material chemistry and allied fields..978-981-19-7188-4Series ISSN 2524-5384 Series E-ISSN 2524-5392 作者: Pedagogy 時(shí)間: 2025-3-25 08:44
Dongmin Choi,Byung-jin Jung,Hyungpil Moonlding blocks whereas in the top-down approach, large materials are deconstructed to give nanostructures. However, these approaches comprise various synthesis methods; nevertheless, the chapter will be confined to some recent non-traditional synthesis methods.作者: 廣口瓶 時(shí)間: 2025-3-25 11:57
Mingu Kwon,Dandan Zhou,Shuo Liu,Hao Zhangter will focus on the identification of carbon-rich waste precursors that can be utilized in the synthesis of activated carbon. Both common and innovative methodologies adopted for the preparation of activated carbon will be figured out. Further, the utilization of activated carbon as catalytic mate作者: 不舒服 時(shí)間: 2025-3-25 17:25
Radhen Patel,Rebeca Curtis,Branden Romero,Nikolaus Correlllding blocks whereas in the top-down approach, large materials are deconstructed to give nanostructures. However, these approaches comprise various synthesis methods; nevertheless, the chapter will be confined to some recent non-traditional synthesis methods.作者: PAC 時(shí)間: 2025-3-25 22:58 作者: Axon895 時(shí)間: 2025-3-26 01:27 作者: 首創(chuàng)精神 時(shí)間: 2025-3-26 06:40 作者: otic-capsule 時(shí)間: 2025-3-26 08:53 作者: 全部逛商店 時(shí)間: 2025-3-26 13:12 作者: 拱墻 時(shí)間: 2025-3-26 17:52
Communications in Computer and Information Sciencehttp://image.papertrans.cn/r/image/831116.jpg作者: ETCH 時(shí)間: 2025-3-26 21:35 作者: exclamation 時(shí)間: 2025-3-27 02:06 作者: gangrene 時(shí)間: 2025-3-27 07:28
Robotic Grasping and Manipulation978-3-319-94568-2Series ISSN 1865-0929 Series E-ISSN 1865-0937 作者: Cpap155 時(shí)間: 2025-3-27 12:28 作者: 鄙視讀作 時(shí)間: 2025-3-27 16:01
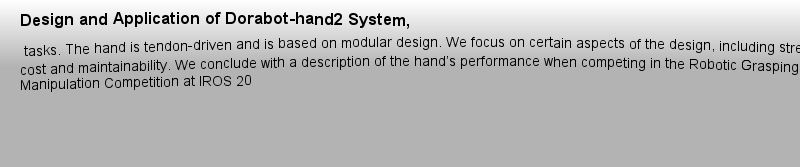
Design and Application of Dorabot-hand2 System, tasks. The hand is tendon-driven and is based on modular design. We focus on certain aspects of the design, including strength, friction, cost and maintainability. We conclude with a description of the hand’s performance when competing in the Robotic Grasping and Manipulation Competition at IROS 2016.作者: Contend 時(shí)間: 2025-3-27 18:51
Robotic Grasping and Manipulation Competition @IROS2016: Team Tsinghua,ted in both the hand-in-hand and fully-autonomous tracks. The structure of a novel designed gripper and an algorithm for object detection and grasp pose estimation are described. The competition results demonstrates the effectiveness of the strategies used in the competition.作者: G-spot 時(shí)間: 2025-3-28 01:23 作者: contrast-medium 時(shí)間: 2025-3-28 04:44
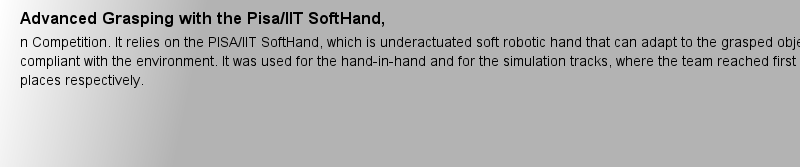
Advanced Grasping with the Pisa/IIT SoftHand,n Competition. It relies on the PISA/IIT SoftHand, which is underactuated soft robotic hand that can adapt to the grasped object shape and is compliant with the environment. It was used for the hand-in-hand and for the simulation tracks, where the team reached first and third places respectively.作者: DOTE 時(shí)間: 2025-3-28 07:01 作者: itinerary 時(shí)間: 2025-3-28 12:41
The TU Hand: Using Compliant Connections to Modulate Grasping Behavior, of the grasping and manipulation competition using a simplified anthropomorphic hand. The hand had a simplified thumb, fixed in the opposed position, and only two actuators. Motions of the fingers and thumb were coupled together using a “ties and skips” architecture where thumb and finger tendons w作者: 擔(dān)憂 時(shí)間: 2025-3-28 16:20 作者: Ingrained 時(shí)間: 2025-3-28 21:20 作者: 領(lǐng)先 時(shí)間: 2025-3-29 00:04
SKKU Hand Arm System: Hardware and Control Scheme, the robot arm system, a driving module unit is designed and the workspace analysis is performed for the arm. A Virtual Spring Damper based controller is applied to the arm system for the task of the control. The design of the robot hand is based on mimicking the human hand and we perform an optimiz作者: 詞匯記憶方法 時(shí)間: 2025-3-29 06:01
A Robotic System for Autonomous Grasping and Manipulation,nipulator introduced into the system, it can achieve far more tasks such as automation of manufacturing and logistics processes. The autonomous track of the IROS2016 Robotic Grasping and Manipulation Competition was designed to bring a robotic system into ordinary everyday tasks involving grasping a作者: 流動(dòng)才波動(dòng) 時(shí)間: 2025-3-29 08:44
Improving Grasp Performance Using In-Hand Proximity and Contact Sensing,OS 2016. A salient feature of our architecture is the tight coupling between visual (Asus Xtion) and tactile perception (Robotic Materials), to reduce the uncertainty in sensing and actuation. We demonstrate the importance of tactile sensing and reactive control during the final stages of grasping u作者: Gullible 時(shí)間: 2025-3-29 12:19 作者: intangibility 時(shí)間: 2025-3-29 17:12 作者: 疾馳 時(shí)間: 2025-3-29 22:33
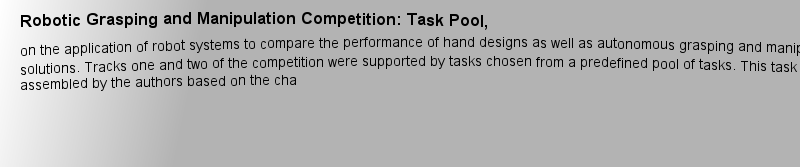
Robotic Grasping and Manipulation Competition: Competitor Feedback and Lessons Learned,re the performance of hand designs as well as autonomous grasping and manipulation solutions across a common set of tasks. The competition was comprised of three tracks that included hand-in-hand grasping, fully autonomous grasping, and simulation. The hand-in-hand and fully autonomous tracks used 1作者: 水獺 時(shí)間: 2025-3-30 01:25
Robotic Grasping and Manipulation Competition: Future Tasks to Support the Development of Assembly ejeon, South Korea was sponsored by the IEEE Robotic and Automation Society (RAS) Technical Committee (TC) on Robotic Hands Grasping and Manipulation (RHGM) [.]. This competition was the first of a planned series of grasping and manipulation-themed events of increasing difficulty that are intended t